Project Overview
Our team was tasked with designing an efficient system capable of scanning luggage barcodes, sorting accepted small luggage models, and transporting them from a servo table to a custom mechanism that connects two platforms. Rejected luggage was to be discarded through a separate system. This project combined mechanical design with software programming for the Q-arm and motor systems, utilizing a Raspberry Pi for integration.
Objectives and Constraints:
- Functionality: The system needed to perform coordinated tasks, including barcode scanning, luggage sorting, and transportation, with precise and synchronized movements.
- Design Requirements: Physical components had to be stable, low-cost, and energy-efficient while ensuring gentle handling of the luggage.
- Programming: The code had to ensure seamless interaction among all components, maintaining boundary limits during initialization and operation.
- Timeframe: The project started on October 4, 2024, and was completed by December 4, 2024.
Contributions:
Software Development:
- Developing Python functions for team integration
- Writing code for:
- Q-Arm
- Rotary Actuator
- Servo Table
- Setting up and configuring Raspberry Pi
Design and Prototyping:
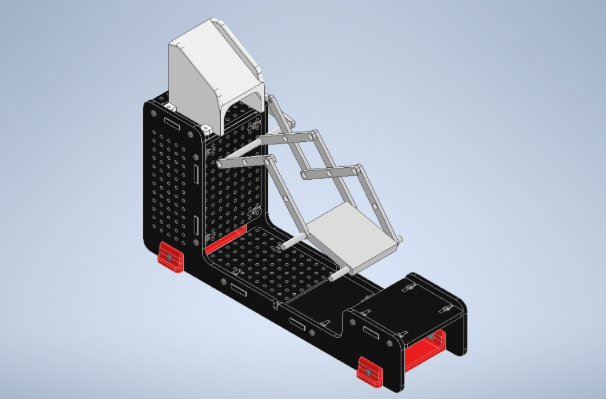
- Sketching the initial mechanism concept
- Creating a CAD model of the mechanism
- Producing detailed engineering drawings
- 3D printing required parts
- Prototyping the mechanism
Testing and Final Adjustments:
- Testing the mechanism's functionality
- Making last-minute modifications with cardboard for optimization
Presentation and Documentation:
- Pitching the project to stakeholders
- Compiling a comprehensive project report